CONEXIÓN PROFIBUS DP III
Configurar
el funcionamiento de una cinta transportadora mediante un variador conectado a
Profibus-DP de la siguiente manera:
Al accionar el
pulsador de marcha arrancaremos la cinta al 25% de la velocidad del
motor, y al detectar un sensor el elemento que transporta la cinta, el motor
acelerará hasta el 100% de su velocidad. Al llegar la pieza al final (detectado
por otro sensor), motor parará durante 10”, para posteriormente invertir el sentido de giro del y funcionando
a la velocidad del 50% del motor, deteniéndose la cinta cuando la pieza vuelva
a ser detectada por el primer sensor. El estado de la cinta transportadora
estará en todo momento señalizado por lámpara (una para el paro, otra para la
marcha, una para cada sentido de giro, y una para cada velocidad distinta del
motor.)
Las entradas que controlan la cinta transportadora estarán
ubicadas en un módulo de periferia descentralizada o autómata programable (el
que se desee). El estado de la cinta transportadora se visualizará desde el
autómata maestro.
Los pasos a realizar serán los siguientes:
- Esquema del sistema de comunicaciones que se va a emplear y descripción del proceso de comunicación.

- Direcciones de memoria utilizadas y contenidos


- Configuración y programación del sistema de comunicaciones
Como se puede identificar estamos en la barra de componentes que nos aparece a la parte derecha de la pantalla

De forma que el bastidor deberia contener lo siguiente:

A continuación procederemos a la configuración de dicha CP, para ello pulsaremos dos veces sobre la CP y nos aparecerá la ventana de propiedades de la CP, nosotros pulsaremos a propiedades y nos aparecerá lla siguiente ventana:

Una vez creada la subred procederemos a poner a la CP como MAESTRO.Pulsaremos en la pestaña modo de operación y nos aparecerá la siguiente ventana.

Seleccionaremos la opción maestro y pulsaremos aceptar.Si hemos realizado todo correctamente deberemos visalizar en la pantalla lo siguiente.

Cuando ya tenemos creada la red y configurada procedemos a introducir los esclavos
Podemos observar que aparece sin necesidad de instalar los archivos GSD el micromaster 420 y esto se debe a que es un variador de SIEMENS por lo que lo reconoce.

Para configurar el esclavo pulsaremos dos eces sobre el y nos aparecerá la ventana de propiedades del esclavo pulsamos sobre la pestaña profibus y podremos modificar su dirección una vez hecho esto podremos asignarle la dirección que queramos.
PROGRAMA
SIEMENS:
Enviamos del byte 4 al byte 8.

- Habilitamos el variador medinte el código 447E.
- Cargamos el valor 1000 (25%) y mediante el código 447F habilitamos el motor para que gire hacia la izquierda.

- Cargamos el valor 4000 (100%).
- Cargamos el dato MW6 para detener el motor y ponemos un emporizador para que una vez pasen 10 seg. el motor arranque en sentido contrario al que o teniamos configurado.

- Cuando se active el temporizador el motor funcianará al 50% de su velocidad.
- Con E124.3 paraaremos el motor.

- AL pulsar E124.7 seteamos la marcha y reseteamos el paro.
AL pulsar E124.0 seteamos la marcha, giro a derechas, 25% de su velocidad y reseteamos el paro.

{kind=link}
- Al activar E124.1 setamos la velociadad (100%) y reseteamos la velociadad (25%)
- Al activar E124.2 setamos la velociadad (0%) y reseteamos marcha,giro a derechas,velociadad (100%).

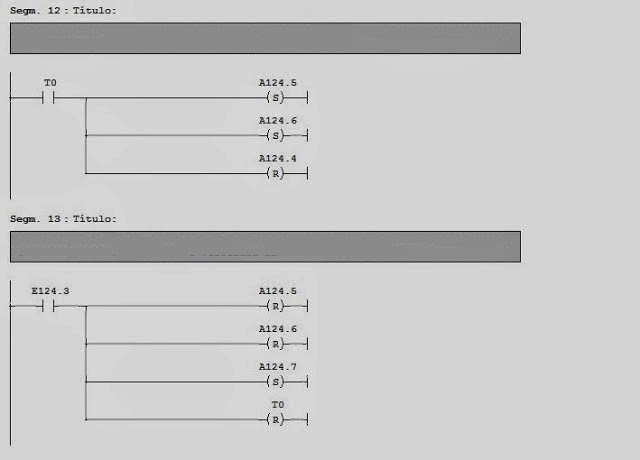
- Al activar el T0 seteamos el giro a izquierdas, velocidad (50%) y velocidad (0%)
- Al activar E124.3 seteamos paro y reseteamos giro a izquierdas, velocidad (50%) y el T0.
En este post, al menos si que explicas la parte del programa. Faltaría explicar al principio, en que consiste el manejo del variador. Para la próxima....
ResponderEliminarAntonio Alhambra